题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知系统结构图如图4-10所示。(1)当a=3时,画出Kg从0变化到+∞时的根轨迹,确定系统无超调时K≇
已知系统结构图如图4-10所示。
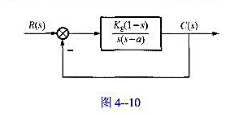
(1)当a=3时,画出Kg从0变化到+∞时的根轨迹,确定系统无超调时Kg的取值范围及系统的临界稳定时的Kg值;
(2)当Kg=3时,画出a从0变化到+∞时的根轨迹,确定系统 时的a值。
时的a值。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
已知系统结构图如图4-10所示。
(1)当a=3时,画出Kg从0变化到+∞时的根轨迹,确定系统无超调时Kg的取值范围及系统的临界稳定时的Kg值;
(2)当Kg=3时,画出a从0变化到+∞时的根轨迹,确定系统时的a值。
答案
 更多“已知系统结构图如图4-10所示。(1)当a=3时,画出Kg从0变化到+∞时的根轨迹,确定系统无超调时K≇”相关的问题
更多“已知系统结构图如图4-10所示。(1)当a=3时,画出Kg从0变化到+∞时的根轨迹,确定系统无超调时K≇”相关的问题
第3题
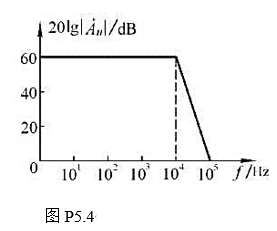
已知某电路的幅频特性如图P5.4所示,试问:(1)该电路的耦合方式;(2)该电路由几级放大电路组成;(3)当f=104Hz时,附加相移为多少?当f=105Hz时,附加相移又约为多少?(4)该电路的上限频率fg为多少?
第4题
某系统结构图如图2-9-7所示
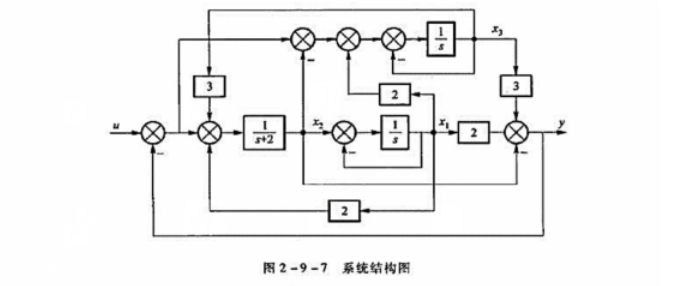
①据图2-9-7所给出的系统状态变量x1、x2、x3,求该系统的动态方程(状态方程和输出方程)。
②根据①所求出的动态方程,判断系统的可控性和可观测性。
③求该系统的矩阵指数eAi。
第5题
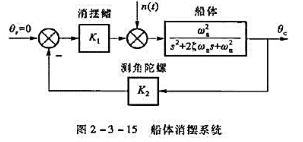
设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果n(t)=10°·1(t).试求使稳态误差enm≤0.1°的K1值。
第8题
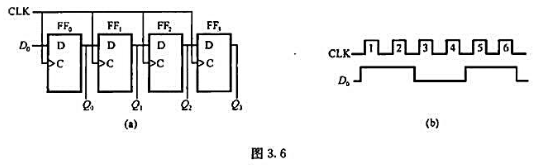
移位寄存器的逻辑结构图如图3.6(a)所示,CLK和D0的输入波形如图3.6(b)所示.设Q初始状态为0,画出Q3~Q0的波形.
第9题
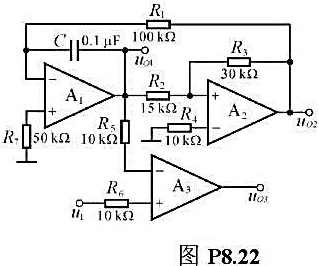
(1)求解uo3的占空比与u1的关系式;
(2)设u1=2.5V,画出uo1、uo2和uo3的波形.
第10题
设速度控制系统如图2-3-12所示。
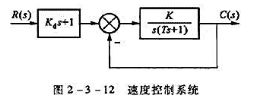
为了消除系统的稳态误差,使斜坡信号通过由比例-微分环节组成的滤波器后再进入系统。
①当Kd=0时,求系统的稳态误差(e=r-c)。
②选择Kd,使系统的稳态误差为零。