题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
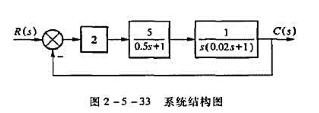
如图2-5-34所示为一小功率随动系统的动态结构图,试用两种方法判别其稳定性。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
 更多“如图2-5-34所示为一小功率随动系统的动态结构图,试用两种方法判别其稳定性。”相关的问题
更多“如图2-5-34所示为一小功率随动系统的动态结构图,试用两种方法判别其稳定性。”相关的问题
第1题
设速度控制系统如图2-3-12所示。
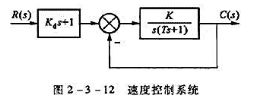
为了消除系统的稳态误差,使斜坡信号通过由比例-微分环节组成的滤波器后再进入系统。
①当Kd=0时,求系统的稳态误差(e=r-c)。
②选择Kd,使系统的稳态误差为零。
第2题
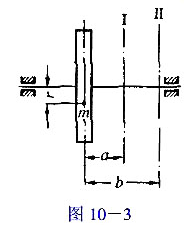
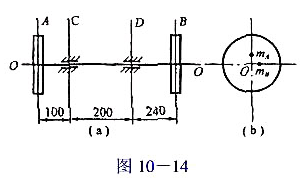
 .它们偏心方向线夹角如图(b)所示为90°.该轴由C和D两轴承支承,相对距离如图(单位:mm).今若允许在某一回转面E内回转半径为10mm处加一平衡质量,使整个回转件达到静平衡,且今轴承D所受的动反力最小.试求:
.它们偏心方向线夹角如图(b)所示为90°.该轴由C和D两轴承支承,相对距离如图(单位:mm).今若允许在某一回转面E内回转半径为10mm处加一平衡质量,使整个回转件达到静平衡,且今轴承D所受的动反力最小.试求:(1)平面E中所加平衡质量mE的大小和其偏心方向线相对A的偏心方向间的夹角 EA;
EA;
(2)平面E相对圆盘A的轴向距离dAE;
(3)当转轴转速为3000r/min时,试比较加平衡质量前、后轴承D所受动反力的大小.并指出消除此动反力的办法.
第3题
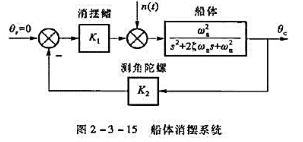
设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果n(t)=10°·1(t).试求使稳态误差enm≤0.1°的K1值。
第4题
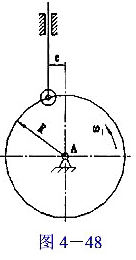
设计一偏置直动滚子从动件盘形凸轮机构,凸轮回转方向及动件初始位置如图4-48所示,已知:偏距e=5mm,基圆半径R=20mm,滚子半径rT=5mm,升程h=15mm,从动件运动规律:升程运动角φ=180°从动件以等加速等减速运动上升,远休止角φ8=30°,回程运动角φ´=120°从动件以等速运动至最低点,近休止角φ´s=30°,试:
(1)绘出从动件位移线图;
(2)绘出凸轮实际轮廓曲线.
第5题
A.液压动力转向系统是一个位置跟踪装置,滑阀的运动是输入信号,转向螺杆是输出信号
B.液压随动系统是一个力的放大装置,动力缸活塞的推力由油压决定
C.动力缸活塞的移动必须落后于滑阀移动一段距离
D.动力缸活塞与滑阀间存在机械反馈联系
第6题
如图4-3所示,有一个平行板电容器,所带的电量为Q,两板问的电势差为U.现在向电容内插入一块厚介质板,插入后电容器上() A.Q不变,U改变 B.Q不变,U也不变 C.Q改变,U不变 D.Q改变,U也改变
第7题
由于SPM随长度而积累,因而是采用G.652光纤的单波长系统的基本非线性损伤,门限功率大约为()dBm。
A.18
B.28
C.38
D.48
第10题
辅助操纵系统包括:
A.副翼调整片,升降舵调整片,方向舵调整片,副翼随动补偿片,襟翼,前轮转弯的操纵。
B.副翼调整片,升降舵调整片,方向舵调整片,副翼随动补偿片,襟翼,舵面锁,前轮转弯的操纵。
C.副翼调整片,升降舵调整片,方向舵补偿调整片,副翼随动补偿片,襟翼,舵面锁的操纵。
D.副翼调整片,升降舵调整片,方向舵补偿调整片,副翼随动补偿片,襟翼,舵面锁,前轮转弯的操纵。
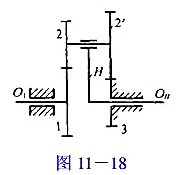
第11题
图11-18所示行星轮系中,如轮1轴上的输入功率为P1=7355W,且其转速为n1=700r/min;各轮齿数为z1=z2´=40,z2=z3=30;每对齿轮的效率为η=0.9.试问从动轴OH输出的力矩有多大?