题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
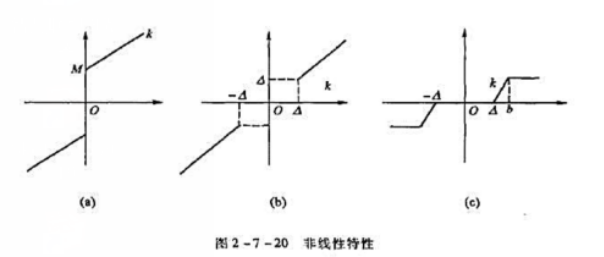
非线性特性如图2-7-20所示,试计算非线性特性的描述函数,并在复平面上画出负倒描述函数-1/N(x)。
非线性特性如图2-7-20所示,试计算非线性特性的描述函数,并在复平面上画出负倒描述函数-1/N(x)。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
非线性特性如图2-7-20所示,试计算非线性特性的描述函数,并在复平面上画出负倒描述函数-1/N(x)。
答案
 更多“非线性特性如图2-7-20所示,试计算非线性特性的描述函数,并在复平面上画出负倒描述函数-1/N(x)。”相关的问题
更多“非线性特性如图2-7-20所示,试计算非线性特性的描述函数,并在复平面上画出负倒描述函数-1/N(x)。”相关的问题
第1题
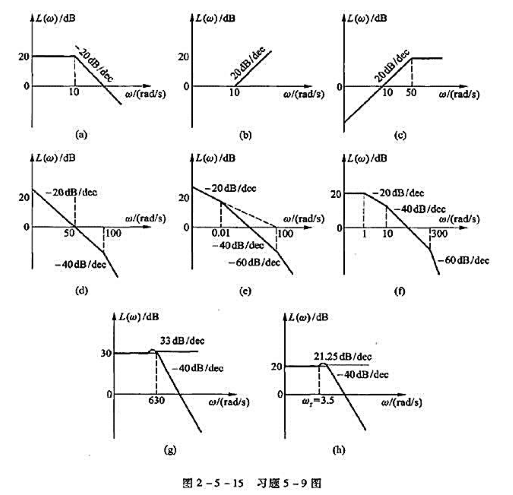
已知一些最小相位元件的对数幅频特性曲线如图2-5-15所示,试写出它们的传递函数G(s) ,并计算出各参数值。
第3题
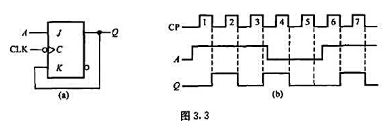
JK触发器组成图3.3(a)所示电路.试分析电路的逻辑功能.已知电路CLK和A的输入波形如图3.3(b)所示.设Q输出初态为0,画出Q的波形.
第5题
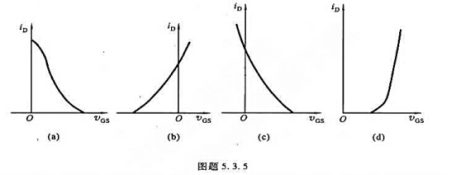
四个FET的转移特性分别如图题5.3.5a,b,c,d所示,其中漏极电流iD的假定正向是它的实际方向.试问它们各是哪种类型的FET?
第6题
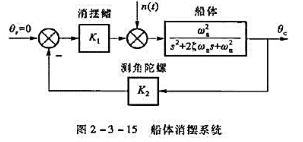
设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果n(t)=10°·1(t).试求使稳态误差enm≤0.1°的K1值。
第8题
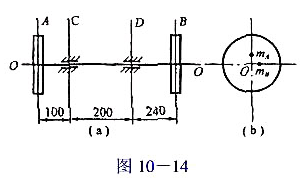
 .它们偏心方向线夹角如图(b)所示为90°.该轴由C和D两轴承支承,相对距离如图(单位:mm).今若允许在某一回转面E内回转半径为10mm处加一平衡质量,使整个回转件达到静平衡,且今轴承D所受的动反力最小.试求:
.它们偏心方向线夹角如图(b)所示为90°.该轴由C和D两轴承支承,相对距离如图(单位:mm).今若允许在某一回转面E内回转半径为10mm处加一平衡质量,使整个回转件达到静平衡,且今轴承D所受的动反力最小.试求:(1)平面E中所加平衡质量mE的大小和其偏心方向线相对A的偏心方向间的夹角 EA;
EA;
(2)平面E相对圆盘A的轴向距离dAE;
(3)当转轴转速为3000r/min时,试比较加平衡质量前、后轴承D所受动反力的大小.并指出消除此动反力的办法.
第9题
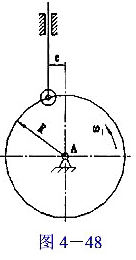
设计一偏置直动滚子从动件盘形凸轮机构,凸轮回转方向及动件初始位置如图4-48所示,已知:偏距e=5mm,基圆半径R=20mm,滚子半径rT=5mm,升程h=15mm,从动件运动规律:升程运动角φ=180°从动件以等加速等减速运动上升,远休止角φ8=30°,回程运动角φ´=120°从动件以等速运动至最低点,近休止角φ´s=30°,试:
(1)绘出从动件位移线图;
(2)绘出凸轮实际轮廓曲线.
第10题
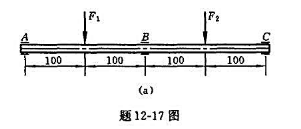
题12-17图(a)所示传动轴,由于加工误差,轴承C的位置偏离轴线δ=0.25mm,试计算安装后轴内的最大弯曲正应力。已知轴的径d=50mm,弹性模量E=200GPa。
第11题
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中加比例及微分串联校正和速度反馈两种不同方案,校正前后的具体结构参数如图2-4-23所示。
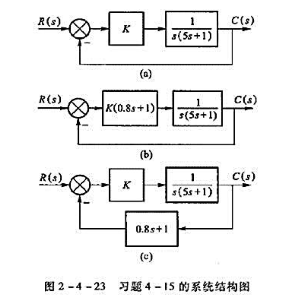
①试分别绘制这三个系统K从0→∞的闭环根轨迹图。
②比较两种校正对系统阶跃响应的影响。
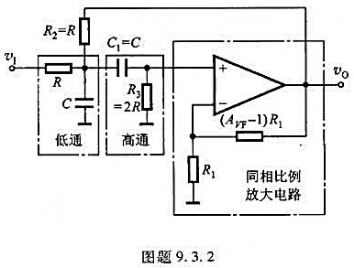
 试计算中心频率f0和带宽BW,画出其选频特性。
试计算中心频率f0和带宽BW,画出其选频特性。