题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
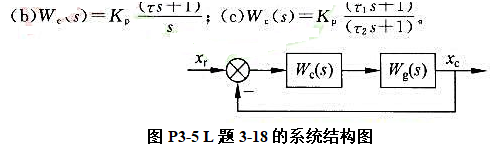
如图P3-5所示系统,图中的Ws(5)为调节对象的传递函数,Wc(s)为调节器的传递函数。如果被控对
如图P3-5所示系统,图中的Ws(5)为调节对象的传递函数,Wc(s)为调节器的传递函数。如果被控对象为 ,系统要求的指标为:位置稳态误差为等,调节时间最短,超调量σ%≤4.3%,问下述三种调节器中哪一种能满足上述指标?其参数应具备什么条件?三种调节器分别为(a)Wc(s)=Kp
,系统要求的指标为:位置稳态误差为等,调节时间最短,超调量σ%≤4.3%,问下述三种调节器中哪一种能满足上述指标?其参数应具备什么条件?三种调节器分别为(a)Wc(s)=Kp
 答案
答案
查看答案