题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
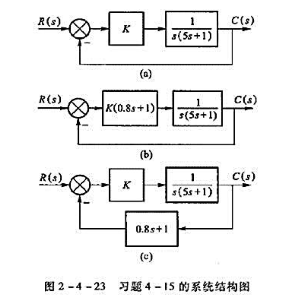
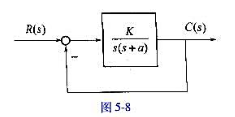
系统如图所示,K>0, 输入r(t)=Acos3t 时,从示波器中观测到输入,输出的幅值相等,相位差90°。(1)确
系统如图所示,K>0, 输入r(t)=Acos3t 时,从示波器中观测到输入,输出的幅值相等,相位差90°。
(1)确定参数a,K;
(2)若输入r(t)=3cosωt.确定ω为何值时,稳态输出c(t)的幅值最大,并求出此最大幅值。
 答案
答案
查看答案