

 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[判断题]
直流系统在变电站中为控制、信号、继电保护、自动装置及事故照明等提供可靠的直流电源。()
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
 更多“直流系统在变电站中为控制、信号、继电保护、自动装置及事故照明等提供可靠的直流电源。()”相关的问题
更多“直流系统在变电站中为控制、信号、继电保护、自动装置及事故照明等提供可靠的直流电源。()”相关的问题
第1题
A.微机继电保护
B.微机监视控制
C.微机自动控制装置
D.远动及数据通信
第8题
第9题
在摄像机自动聚焦控制系统中,主要由两块集成电路组成,其中一块是该系统的控制中心,它是一个()。
A.控制和信号检测用的接口电路
B.A/D转换器
C.D/A转换器
D.单片微处理器
第10题
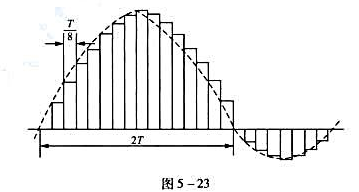
数宽度截取8T(中心向左右对称),矩形窄脉冲宽度T/8.每当一个“1"码到来时(由速率为2π/T的窄脉冲控制)即出现Sa码波形(峰值延后4T).
(1)画出此系统逻辑框图和主要波形;
(2)考虑此系统是否容易实现;
(3)在得到上述信号之后,若要去除波形中的小阶梯,产生更接近连续Sa函数的波形需采取什么办法?
第11题
(1) 在此系统中,当转速给定信号最大值Unm=15V时, n=nN=1500r/min;电流给定信号最大值Uim=10V时, 允许最大电流Icm=30A, 电抠回路总电阻R=1.4 , PWM变换器的放大倍数Ks=30,电动机额定电流Is=20A, 电动势系数Ce=0.128V·min/r,现系统在Ln=5V, Idl=20A时稳定运行。求此时的稳态转速n=?ACR的输出电压Uc=?
, PWM变换器的放大倍数Ks=30,电动机额定电流Is=20A, 电动势系数Ce=0.128V·min/r,现系统在Ln=5V, Idl=20A时稳定运行。求此时的稳态转速n=?ACR的输出电压Uc=?
(2)当系统在上述情况下运行时,电动机突然失磁( =0),系统将会发生什么现象?试分析并说明之。若系统能够稳定下来,则稳定后n=?Un=? Ui=? Id=? Uc=?
=0),系统将会发生什么现象?试分析并说明之。若系统能够稳定下来,则稳定后n=?Un=? Ui=? Id=? Uc=?
(3)该系统转速环按典型Ⅱ型系统设计,且按Mmin准则选择参数,取中频宽h=5,已知转速环小时间常数T n=0.05s, 求转速环在跟随给定作用下的开环传递函数, 并计算出放大系数及各时间常数。
n=0.05s, 求转速环在跟随给定作用下的开环传递函数, 并计算出放大系数及各时间常数。
(4) 该系统由空载(IdL=0) 突加额定负载时, 电流Ⅰd和转速n的动态过程波形是怎样的?已知机电时间常数Tm=0.05s, 计算其最大动态速降△nmax和恢复时间t。



















