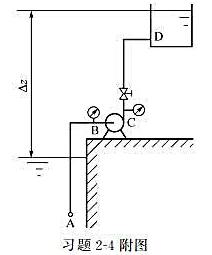
题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[判断题]
动力学反问题是已知机构的工作阻力,求解输入转矩和各运动副反力及其变化规律。()
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
 更多“动力学反问题是已知机构的工作阻力,求解输入转矩和各运动副反力及其变化规律。()”相关的问题
更多“动力学反问题是已知机构的工作阻力,求解输入转矩和各运动副反力及其变化规律。()”相关的问题
第6题
第10题
A.可以由多项式时间算法求解的问题是难处理的
B.需要超过多项式时间算法求解的问题是易处理的
C.可以由多项式时间算法求解的问题是易处理的
D.需要超过多项式时间算法求解的问题是不能处理的
第11题