

 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知非线性系统的数学模型为(1)当初始条件为时,绘制相轨迹;(注:在相平面上标出各段相轨迹的起
已知非线性系统的数学模型为
(1)当初始条件为 时,绘制相轨迹;(注:在相平面上标出各段相轨迹的起点和终点坐标);
时,绘制相轨迹;(注:在相平面上标出各段相轨迹的起点和终点坐标);
(2)分析系统的稳定性;
(3)若系统稳定,计算从初态达到平衡状态所需的时间。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
已知非线性系统的数学模型为
(1)当初始条件为时,绘制相轨迹;(注:在相平面上标出各段相轨迹的起点和终点坐标);
(2)分析系统的稳定性;
(3)若系统稳定,计算从初态达到平衡状态所需的时间。
答案
 更多“已知非线性系统的数学模型为(1)当初始条件为时,绘制相轨迹;(注:在相平面上标出各段相轨迹的起”相关的问题
更多“已知非线性系统的数学模型为(1)当初始条件为时,绘制相轨迹;(注:在相平面上标出各段相轨迹的起”相关的问题
第1题
已知系统结构图如图4-10所示。
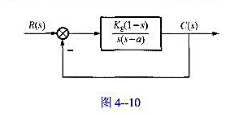
(1)当a=3时,画出Kg从0变化到+∞时的根轨迹,确定系统无超调时Kg的取值范围及系统的临界稳定时的Kg值;
(2)当Kg=3时,画出a从0变化到+∞时的根轨迹,确定系统 时的a值。
时的a值。
第2题
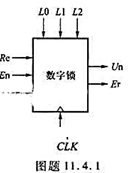
(1)画出系统的ASM图。
(2)画出系统的状态转换图。
(3)用Verilog HDL语言描述其工作过程。
提示:数字锁系统的示意图如图题11.4.1所示,由于开锁过程比较简单,所以没有划分控制单元和处理单元。L0、L1、L2用于从到高位设置密码,另外三个输入端Re,En,Ki中,Re是复位端,当Re=
1时,系统复位进入初始状态;En是控制井关,Ki是数据输入端,当按一下En键使En=1时,从Ki端输入一个数码,再按一下En键,再送一个数码,直到将三个数码送完为止。每输入一个数据都要同原设定的密码比较,依次从低位到高位进行。若相等则准备接收下一位数码,若不相等,系统应进入错误状态。输入数码的位数也是开锁的条件。当输入数码的位数和位值与相应密码都相等时,系统发出开锁信号Un=1,锁被打开,否则Er=1表示开锁过程错误。为保密起见,中间错误状态不显示,并且不能返回初态,直到三个数码全部送完为止。
第3题
已知一单位负反馈系统的开环传递函数为

(1)作系统的根轨迹图,并确定临界阻尼时的Kg值。
(2)求系统稳定的Kg值范围。
第4题
一单位反馈控制系统的开环传递函数为
已知系统的x(t)=1(t),误差时间函数为e(t)=1.4e1.07t-0.4-3.73,求系统的阻尼比ζ、自然振荡角频ω0率 、系统的开环传递函数和闭环传递函数、系统的稳态误差。
第5题
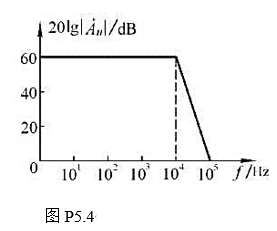
已知某电路的幅频特性如图P5.4所示,试问:(1)该电路的耦合方式;(2)该电路由几级放大电路组成;(3)当f=104Hz时,附加相移为多少?当f=105Hz时,附加相移又约为多少?(4)该电路的上限频率fg为多少?
第6题
已知单位负反馈系统的开环传递函数为
(1)绘制Kg由0→∞变化时的根轨迹。
(2)求产生重根和纯虚根时的Kg值。
第7题
已知系统的开环传递函数为 试完成:
试完成:
(1)判断闭环系统的稳定性;
(2)若实施中联校正,校正装置为 ,计算校正后的穿越频率ωc和相角裕量γ;
,计算校正后的穿越频率ωc和相角裕量γ;
(3)该校正装置是超前还是滞后网络?对系统动态性能指标有何改善?
(4)该校正装置对系统的静态性能有无影响?为什么?
第8题
能确定某企业产值的月平均增长率.
(1)已知一月份的产值.
(2)已知全年的总产值.
A.条件(1)充分,但条件(2)不充分
B.条件(2)充分,但条件(1)不充分
C.条件(1)和条件(2)单独都不充分,但条件(1)和条件(2)联合起来充分
D.条件(1)充分,条件(2)也充分
E.条件(1)和条件(2)单独都不充分,条件(1)和条件(2)联合起来也不充分
第9题
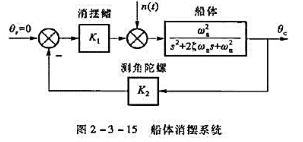
设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果n(t)=10°·1(t).试求使稳态误差enm≤0.1°的K1值。
第10题
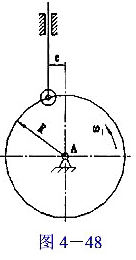
设计一偏置直动滚子从动件盘形凸轮机构,凸轮回转方向及动件初始位置如图4-48所示,已知:偏距e=5mm,基圆半径R=20mm,滚子半径rT=5mm,升程h=15mm,从动件运动规律:升程运动角φ=180°从动件以等加速等减速运动上升,远休止角φ8=30°,回程运动角φ´=120°从动件以等速运动至最低点,近休止角φ´s=30°,试:
(1)绘出从动件位移线图;
(2)绘出凸轮实际轮廓曲线.
第11题
A.可供出售金融资产,初始计量为公允价值,交易费用计入当期损益
B.持有至到期投资,初始计量为公允价值,交易费用计入初始入账金额,构成成本组成部分
C.贷款和应收款项,初始计量为公允价值,交易费用计入初始入账金额,构成成本组成部分
D.以公允价值计量且其变动计入当期损益的金融资产,初始计量为公允价值,交易费用计入当期损益



















