题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设系统状态方程为试证明系统不是完全可观测的,并用可逆线性变换将其进行可观测性分解。
设系统状态方程为
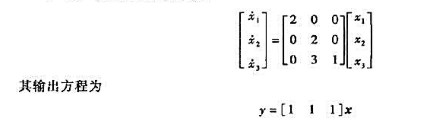
试证明系统不是完全可观测的,并用可逆线性变换将其进行可观测性分解。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
设系统状态方程为
试证明系统不是完全可观测的,并用可逆线性变换将其进行可观测性分解。
答案
 更多“设系统状态方程为试证明系统不是完全可观测的,并用可逆线性变换将其进行可观测性分解。”相关的问题
更多“设系统状态方程为试证明系统不是完全可观测的,并用可逆线性变换将其进行可观测性分解。”相关的问题
第1题
设mc(x)是一致的75%正确的蒙特卡罗算法,考虑下面的算法:

(1)试证明上述算法mc3(x)是一致的27/32正确的算法,因此是84%正确的
(2)试证明如果me(x)不是一致的,则mc3(x)的正确率有可能低于71%.
第2题
(1)试证明下面的算法Primality能以80%以上的正确率判定给定的整数n是否为素数.另一方面,举出整数n的一个例子,表明算法对此整数n总是给出错误的解答,进而说明该算法不是一个蒙特卡罗算法.
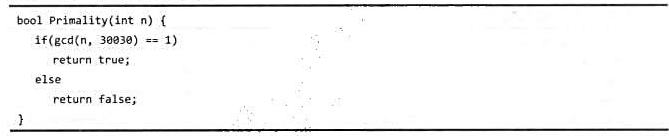
(2)试找出,上述算法Primality中可用于替换整数30030的另一个整数(可使用大整数),使得用此整数代替30030后,算法的正确率提高到85%以上.
第3题
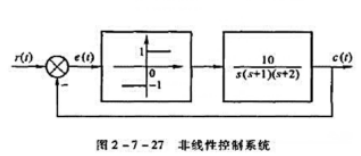
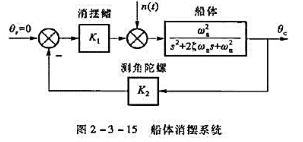
设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果n(t)=10°·1(t).试求使稳态误差enm≤0.1°的K1值。
第5题
Gps的测量精度受多种因素的影响,但下述中的()不是影响因素
A系统本身的误差
B照准误差
C信号传播误差
D接收和观测中的误差
第8题
在自然推理系统P中构造下面推理的证明。
(1)如果今天是星期六,我们就要到颐和园或圆明园去玩,如果颐和园游人太多,我们就不去颐和园玩,今天是星期六,颐和园游人太多,所以我们去圆明园玩。
(2)如果小王是理科学生,他的数学成绩一定很好,如果小王不是文科生,他必是理科生,小王的数学成绩不好所以小王是文科学生
(3)明天是晴天,或是雨天;若明天是晴天,我就去看电影;若我看电影,我就不看书,所以,如果我看书,则明天是雨天
第10题
设对某角观测一测回的观测中误差为±3″,现要使该角的观测结果精度达到±1.4″, 需观测()个测回。
A.2
B.3
C.4
D.5