题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
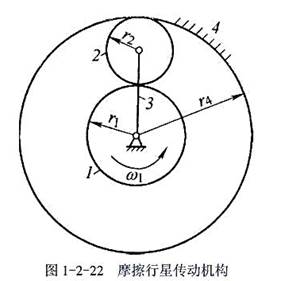
图1-2-22所示为摩擦行星传动机构,设行星2与构建1,4保持纯滚动接触,试用瞬心法求轮1与轮2的角速
比ω1/ω2。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
 更多“图1-2-22所示为摩擦行星传动机构,设行星2与构建1,4保持纯滚动接触,试用瞬心法求轮1与轮2的角速”相关的问题
更多“图1-2-22所示为摩擦行星传动机构,设行星2与构建1,4保持纯滚动接触,试用瞬心法求轮1与轮2的角速”相关的问题
第1题
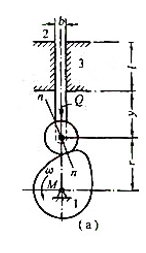
图11-20(a)所示一滚子直动从动件盘形凸轮机构,Q为从动件2所受载荷(包括其重力和惯性力),M为加于凸轮轴上的驱动力矩.设f为从动件与导路之间的摩擦系数,其他运动副间的摩擦损失均略去不计.若y=100mm,l=150mm,b=40mm,f=0.15,压力角a=20°.试求该机构组成机器的瞬时效率.
第2题
在图6-14所示操舵装置的周转轮系中,已知齿数z1=z4.(1)自动操舵时刹住舵轮A,这时复式电动机开动,执行电动机再通过行星轮系1-2-3-4-5及一些其他机构进行操舵,求传动比i15;(2)手动操舵时用控制杆锁住复式电动机,故轮1不动,这时松开舵轮A,并用它通过行星轮系4-3-2-1-5及一些其他机构进行操舵,求传动比i45.
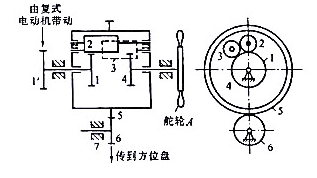
图6-14
第3题
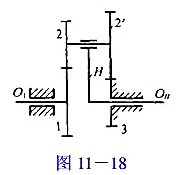
图11-18所示行星轮系中,如轮1轴上的输入功率为P1=7355W,且其转速为n1=700r/min;各轮齿数为z1=z2´=40,z2=z3=30;每对齿轮的效率为η=0.9.试问从动轴OH输出的力矩有多大?
第5题
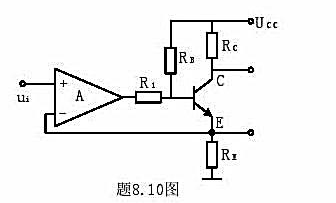
题7.4图(a)所示电路为集电极——基极偏置放大电路,设三极管的β值为50,VCC=20V,RC=10kΩ,RB=330kΩ。
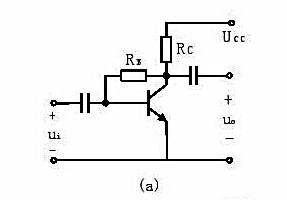 (1)估算电路的静态工作点;
(1)估算电路的静态工作点;
(2)若接上2kΩ的负载电阻,计算电压放大倍数和输入电阻。
第6题
第7题
第9题
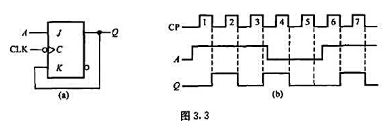
JK触发器组成图3.3(a)所示电路.试分析电路的逻辑功能.已知电路CLK和A的输入波形如图3.3(b)所示.设Q输出初态为0,画出Q的波形.